
Polarith AI



1.8
front-end / back-end: AIMArrive | Arrive
inherits from: AIMRadiusSteeringBehaviour | RadiusSteeringBehaviour
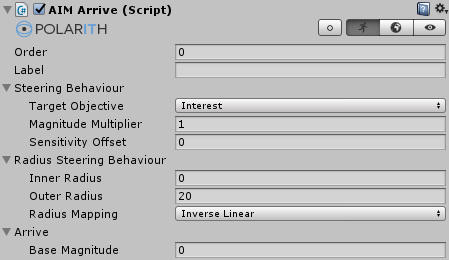
Arrive can be used to regulate the speed of an agent while it is getting closer to its target. For example, it can be configured such that the agent stops before it reaches its target. Note that the actual speed change needs to be handled by the controller of the agent, because Arrive just modifies the resulting objective value of the specified TargetObjective. Another characteristic of Arrive is that it only perceives one object, just like Follow.
Note that Arrive is intended to alter existing objective values, and thus, should be applied after other behaviours, i.e., having a higher order.
This component has got the following specific properties.
| Property | Description |
|---|---|
BaseMagnitude | This value is subtracted from the current maximum magnitude. For example, if the magnitude concerning the target is 1 and if the BaseMagnitude is 0.6, then the maximum magnitude towards the target is 0.4. In this case, the magnitude within the inner and outer radius is interpolated between 0.4 and 0 based on the RadiusMapping type. |
When using our inbuilt controllers, Arrive works as expected only if the controller considers the objective values as speed input (ObjectiveAsSpeed). If using your own controller, it is important to utilize this information as well, for instance by scaling the velocity of the agent with the objective value of the made Decision. If you want the opposite effect, you may set the RadiusMapping parameter to a non-inverse type. This would result in an agent that increases its velocity while it is getting closer to its target, just like a missile.